LIDA 477 编码器位移/速度/加速度采集与转换-PART-LIDA 477-采集转换
关键字:LIDA 477、Hidenhain、磁姗尺、编码器、位移、速度、加速度、Simulink、半实物
一、问题分析
在半实物仿真实验中,我们常用编码器或磁栅尺来采集位移信息。近期在使用 LIDA477 磁栅尺时,遇到以下问题:
- 脉冲倍率理解混乱
- 速度与加速度单位换算
- 噪声干扰
如果不处理好这些问题,实验数据容易出现漂移、异常跳变,导致仿真控制结果失真。
二、处理方法
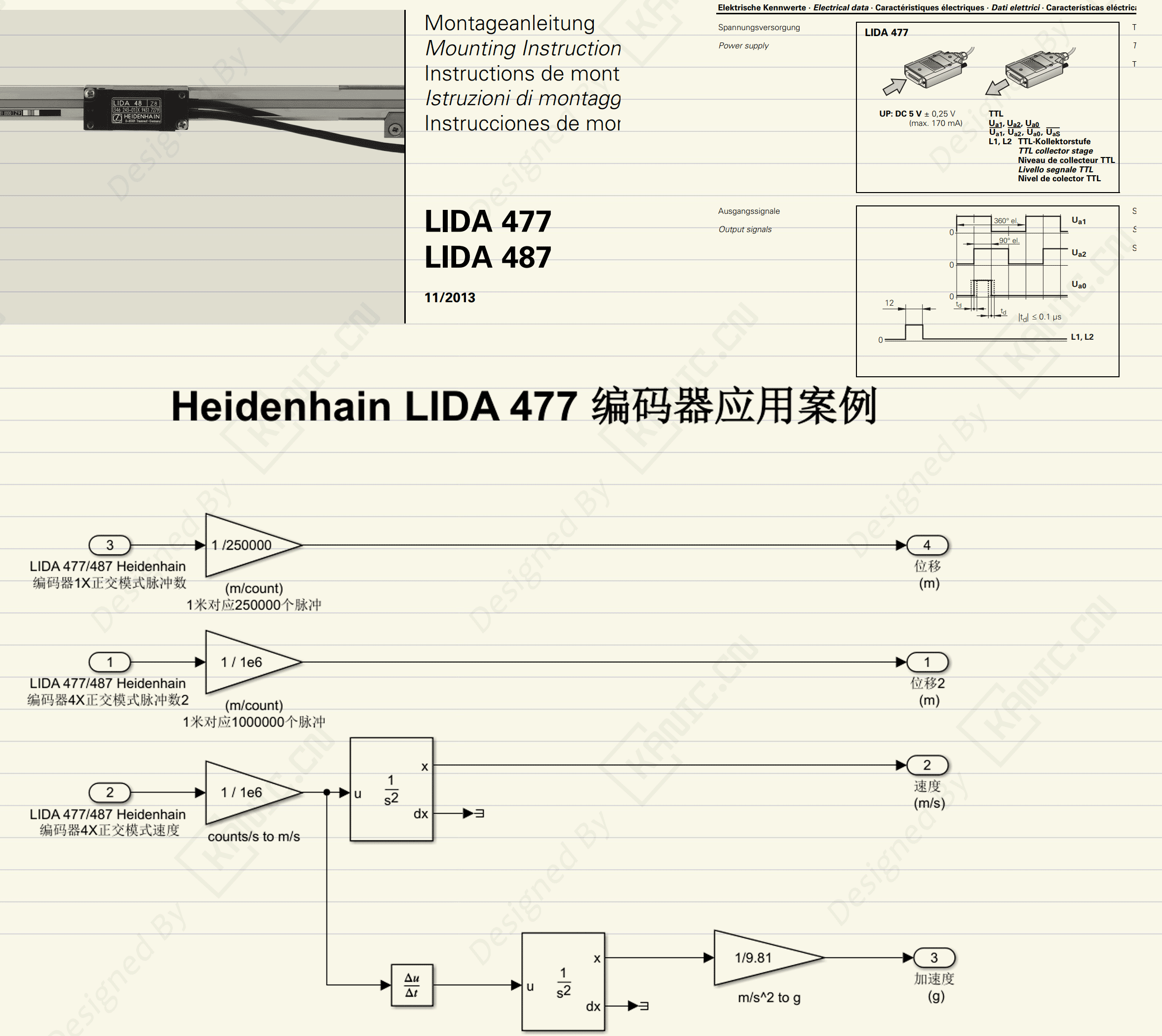
4. 实验步骤示意
- 读取编码器脉冲 → 乘以倍率 → 转换为位移
- 速度采集 → 数字滤波 → 输出滤波速度
- 速度微分 → 得到加速度 → 单位换算成 g
三、经验边界 / 小结
- 经验提示:
2. 滤波参数要结合实验频率响应,避免过度平滑导致动态特性丢失。 3. 加速度计算先为先微分后滤波,否则噪声会被放大。
四、🔑 说明
>本文相关代码与实验案例已整理至 GitHub(KANIC-lab/KANIC),主要用于自动化控制实验、半实物仿真及控制算法验证。
★ 适用场景:
- 自动化控制课程实验搭建
- 研究生论文实验验证
- 控制系统与硬件联调测试
◆ 如需获取以下内容:
- 实验系统配置方案
- 设备租赁与替代方案
- 控制实验快速搭建路径
请通过 GitHub 或文章编号(如 EXP-XXXX-XXX)联系,并说明具体实验需求。